
The US delsys surface myoelectric detection and training system is developed for health care, training, testing, and improving people's living standards. It is practical, portable and easy to operate. The delsys surface EMG detection and training system consists of two main platforms; PC computing shows the storage platform and the lower computer acquisition, display, transmission and storage platforms. The lower computer hardware is ARM7 digital processing center and front-end amplification filter analog processing circuit; the lower computer software is embedded system with touch screen, with USB transmission, WiFi wireless transmission, SD storage and other modules, convenient and efficient. The upper computer realizes nonlinear dynamic analysis and feedback therapy training for myoelectric signals. This system is both feasible and flexible for deeper research.
0 Preface
Myoelectricity is the result of the bioelectricity of human muscles and nerves. Many goals can be achieved by using myoelectric signals, such as using myoelectric control prostheses, myoelectric stimulation to treat muscle atrophy, and diagnosing muscle strength and muscle fatigue in physical activity. Surface electromyography is a bioelectrical signal of nerves and muscles recorded from the surface of human skin through electrodes. It has the advantages of non-invasiveness and simple operation, and has broad application prospects. The system detects the interface is simple and convenient, easy to accept, small and practical, low power consumption. The following mainly introduces the design and implementation of the lower computer software of the surface electromyography detection and training system.
1 Overall design of surface electromyography detection and training system
The system design is divided into front-end analog amplifier circuit, AT91SAM7SE512 lower-position machine programming and host computer software.
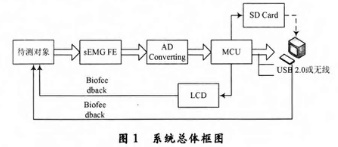
The main technical aspects of the system consist of six parts: analog front end, A/D sampling, data storage and display, USB 2.0 data transmission, wireless data transmission, software analysis and feedback therapy, as shown in Figure 1.
2 front-end analog amplification and A/D sampling circuit design
Weak signal amplification is the basis for ensuring the performance of the entire system. Its design points are high input impedance, high gain, wide frequency band, low noise, high common mode rejection ratio, and can effectively amplify surface EMG signals while suppressing various noise signals. Based on the characteristics of sEMG signals, both ISEK and SENIAM do not recommend 50 Hz notch filters. Therefore, INA 129 with high common-mode rejection ratio is used as preamplifier in this system to eliminate power frequency interference as much as possible. To prevent saturation due to common mode signals, the reference electrode is introduced using the right leg drive technique. The OPA2277 is used to form the right leg drive, filter and amplification unit. In order to improve the accuracy, the front-end analog amplification section has been as close as possible to the test end and then to the main amplifier board.
After the AD and the main amplifier board isolate the main control board SPI interface signal, the AD device ADS8513 is controlled to sample the amplified surface electromyogram. The surface EMG signal is mainly filtered and amplified by the OPA2277. The board is a dual-channel surface myoelectric amplifier, which is filtered by a fourth-order low-pass, second-order high-pass filter, and has an effective bandwidth of 20 to 500 Hz, which is amplified to 4 000 to 20,000 times. The preamplifier consists of INA129 and forms a common mode negative feedback circuit with OPA2277 to increase the total mode rejection ratio of the measurement. The preamplifier board and the AD and the main amplifier board are connected by an IEEE 1394 cable.
3 data storage and display
The sEMG data collected by the system can be directly stored in the local SD card, and the design of the SD card driver and the implementation of the FAT32 file system based on the embedded system are required. Porting FatFs Modu le first writes a simple test read/write 512 B read/write program, and then wraps it into the upper file system for calling.
The interface with UIGUI refers to the function of reading and writing files in ff.h. For example, to read the file directory, write a recursive function with f_readdir(&dlist,&finfo) to read all the file names in the SD card. The file name read out can be placed directly in the application function of the GUI.
4 USB 2.0 data transfer
The collected data can be transmitted to the host computer in real time, and the data stored in the SD card can be transmitted to the host computer via the USB 2.0 interface. To do this, you need to design a USB 2.0 interface on the lower computer. The host computer does not count the USB2.0 device driver. USB is fast and stable, easy to plug and unplug, and can be easily applied to electronic products. USB is easy to use, but programming is complicated. First of all, you should be familiar with the USB workflow. The USB device request format consists of 8 bytes. They are device request type, device request, value, value, index, and length. The lower computer obtains the standard command from the computer, and then the lower computer selects the desired command by void userDriver_RequestHandler(const USBGenericRequest*request). USB transfer is shown in Figure 2.
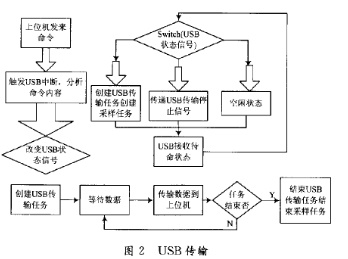
The lower computer responds to the command of the upper computer with an interrupt, and starts to shield the display of the lower computer and the touch detection of the touch screen when enumerating. Then, after the host computer sends the sampled signal, it starts to create a task and transfer the data. After the host computer sends a stop command, the sampling and transmission services are automatically deleted, and the display of the lower computer and the touch detection of the touch screen are released.
5 wireless transmission
When the system is connected to a PC, both wireless and wired are available. The wireless network has many applications in daily life, such as being able to connect directly to the Internet during a business trip. If a wireless device can be used in a healthcare device, its flexibility, portability, and remote monitoring can be well represented. WiFi wireless devices are used in this system.
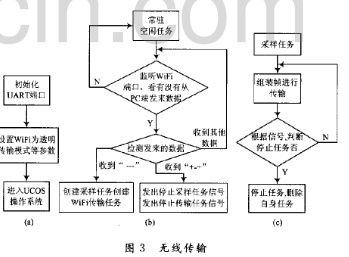
Nano WiReach can realize serial transparent WiFi transmission, and configure reasonable parameters, such as reasonable data packet size and transmission interval, and strive to reduce the burden of transmission components under the speed and correctness of data transmission. Use algorithms to ensure certain correctness and reduce the possibility of TCP\IP packet retransmission.
The programming process is shown in Figure 3.
6 software analysis and feedback therapy
Software analysis and feedback therapy are the specific embodiment of the whole system function, and realize most of the functions of function evaluation and feedback therapy. Functional assessment with surface myoelectricity as a monitoring device has a clear assessment of the treatment to enhance or attenuate the bioelectrical activity of the muscle, whether to relieve the symptoms of myotonia, and whether to restore the resting resting potential of the muscle. The feedback therapy is directly perceived by the cartoon animation signal or sound feedback driven by the surface electromyography signal analysis results to the human body. The subject is guided to consciously perform self-regulation of learning and physiological activities to achieve self-control and achieve prevention. The purpose of treatment. Feedback can be used for muscle relaxation training, excitability training (muscle strength training, muscle endurance training), coordination and precision training, upper/lower limbs, and active/passive rehabilitation training.
The software part needs to process and analyze the acquired sEMG signal, firstly pre-processing, including filtering (removing ECG interference and 50Hz power frequency interference), full-wave rectification (RMS method), regularization (Maximum Voluntary Contraction. MVC), etc. , then time domain parameter extraction (including Peak.Mcan, Arca/IEMG), frequency domain parameter extraction (including Mean Frequency, Median Frequency, Peak Power), others include Time to Peak calculation, Onset/Offset calculation (calculation of Onset time) And Offset time to reflect the nerve conduction velocity) and so on. In addition, it is proposed to extract nonlinear parameters and related experimental research, including the extraction of nonlinear parameters such as basic scale entropy and multifractal analysis, and the correlation between these nonlinear parameters and various neuromuscular system components. The software can be connected by wired or wireless connection, as shown in Figure 4.
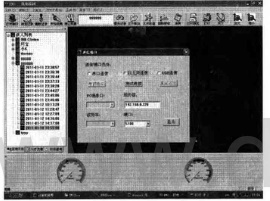
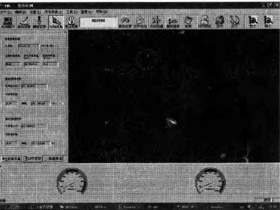
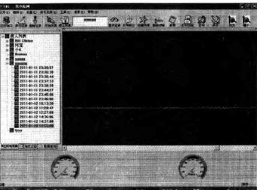
The game function and data display are shown in Figure 5 and Figure 6. The system acquisition input is dual channel, and the interface is programmed by VC.
7 Conclusion
With the development of society, the demand for medical care products will become larger, and the requirements for products will be higher. The research on myoelectricity is deepening in recent years, and the surface electromyography training and detection system can detect the EMG signals. It also helps with training and is a practical system. The surface electromyography training and detection system is based on the ARM platform system, small, full-featured, and UCOS operating system, which facilitates future function expansion and is easy to maintain and use.
With low-power, miniature size, the serial communication department range sensor with mm accuracy can measure up to 20m, 40m, 60m, 100m, 150m, 200m.
If you want to connect our laser range sensor boards together with your computer, you can directly choose the model with one USB connector.
In your project, you can use our distance sensor panel to measure a distance.

Serial Laser Distance Sensor,Serial Communication Laser Distance Sensor,Laser Range Sensor Boards,Distance Sensor Panel
Chengdu JRT Meter Technology Co., Ltd , https://www.irdistancesensor.com